
İlk çıkışı Agisoft Photoscan olarak bilinin Agisoft Metashape fotogrametri yazılımları arasında kendine has özeliği ile dikkat çekmektedir. Bu yazılım diğer fotogrametri yazılımları arasında bir çok özelliği ile bir birinden ayrılmaktadır. Agisoft CBS uygulamaları, Kültürel Miras, oyun geliştiricileri, görsel efekt elde etme için kullunalılan profesyonel fotogrametri yazılımıdır. Agisoft hem yakın mesafe, hem de hava fotogrametrisi için en uygun yazılımlarından biridir.
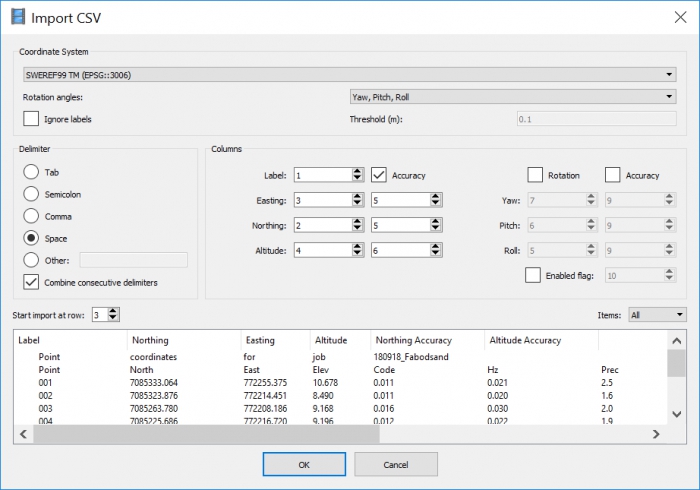
Metashape diğer yazılımların aksine balık gözü kameralar ile çekilmiş fotoğraflardan 3d model oluşturmak ve fotogrametrik halihazır harita üretmek mümkündür. Kameraları otomatik kalibre etme özeliği olan Agisoft çoklu kamera projelerini desteklemektedir. Agisoft ile yogun nokta bulutu ve en doğru sonuçlar elde edersiniz. .las dosyası export ederek sayısal yükseklik modeli oluşturma , üçgen model oluşturma, eğri geçirme ve daha bir çok özelliği gerçekleştirebilirsiniz. Dijital yükseklik modeli DSM, DTM export edebilirsiniz.
Metashape ile proje verilerinden dijital arazi modeli oluşturabilirsiniz. Fotoğrafların exif meta verilerini program otomatik olarak tanımaktadır. WGS84, UTM vb projeksiyonları desteklemektedir. büyük projeler için geotiff, kml, ortofotoları export edebilirsiniz.multispektral kameralardan çekilmiş hava fotoğraflarını programda işleyebilirsiniz.Arkeolojik yapılar, tarihi eserler, binalar, iç mekanlar, insan silueti, heykel vb gibi eserleri 3d model yapabilirsiniz. Özetle Agisoft Metashape tavsiye edilebiliecek en iyi fotogrametri yazılımlarından biridir.
Agisoft PhotoScan Profesyonel Sürümü
PhotoScan çok esnek bir araçtır. Öğrenmesi kolaydır ve aynı zamanda ileri düzey bir kullanıcı için büyük olasılıklara sahiptir.
Ana özellikler : esneklik, doğrusal olmama, Python komut dosyası desteği, dağıtılmış işleme.





